Robot Line Follower atau kita bisa sebut juga Robot Line Tracer yang sesuai namanya, bertugas untuk mengikuti garis. Ada 2(dua) jenis Robot Line Tracer yaitu Analog dan berbasis Mikrokontroller. Kali ini saya akan membuat Robot Line Follower yang berbasis Analog dengan menggunakan 2(dua) photodioda. Berikut daftar komponen dari robot line follower.
- IC LM324 - Komparator
- IC L293D - Driver Motor
- Photodioda x2
- LED Superbright (cahaya putih) x2
- Resistor
- 330 ohm x2
- 33k ohm x2
- Potensio 50k ohm
Tips
Untuk sumber tegangan sebaiknya untuk driver motor dipisah dengan supply tegangan rangkaian lain
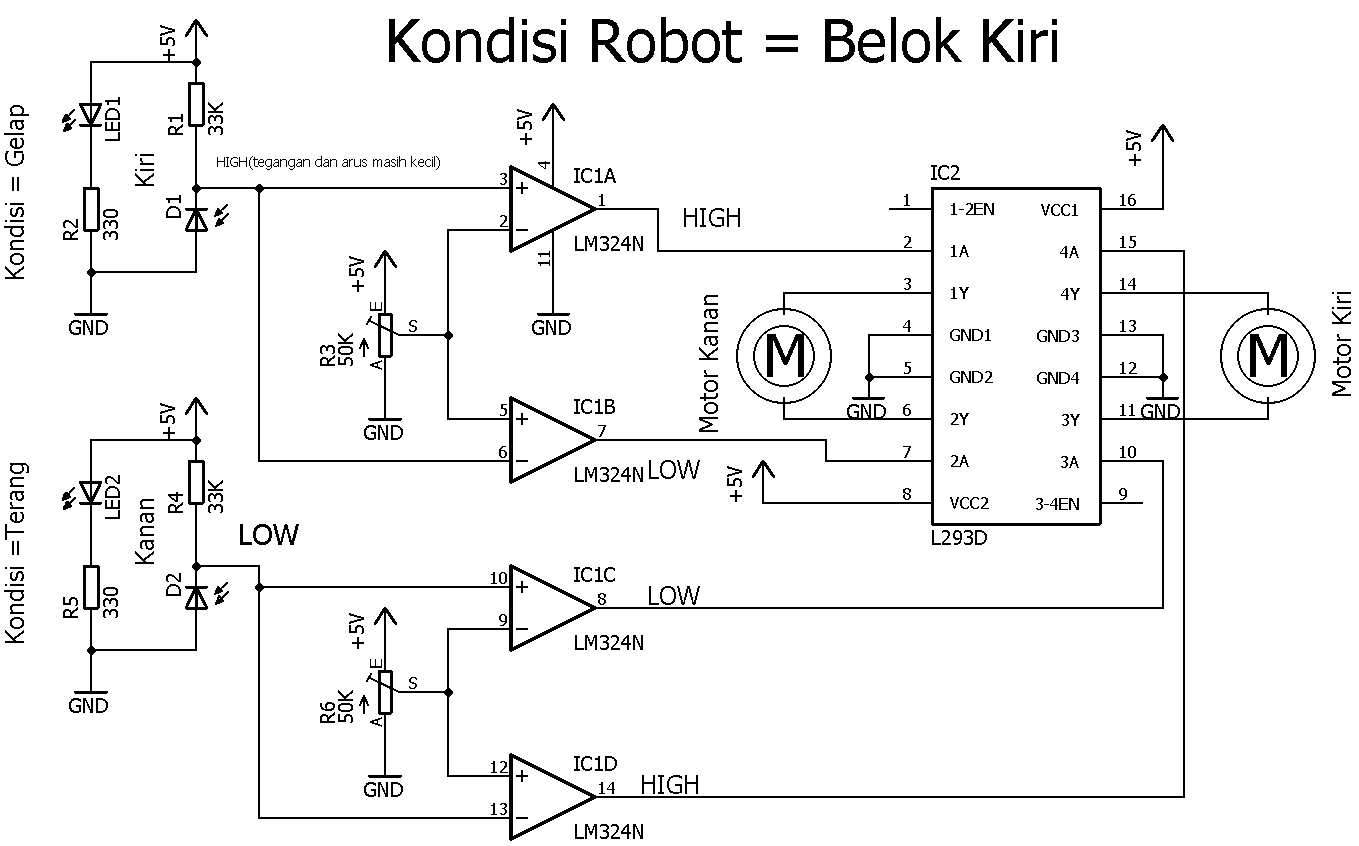
Skema Rangkaian Robot Line Follower/Tracer Analog
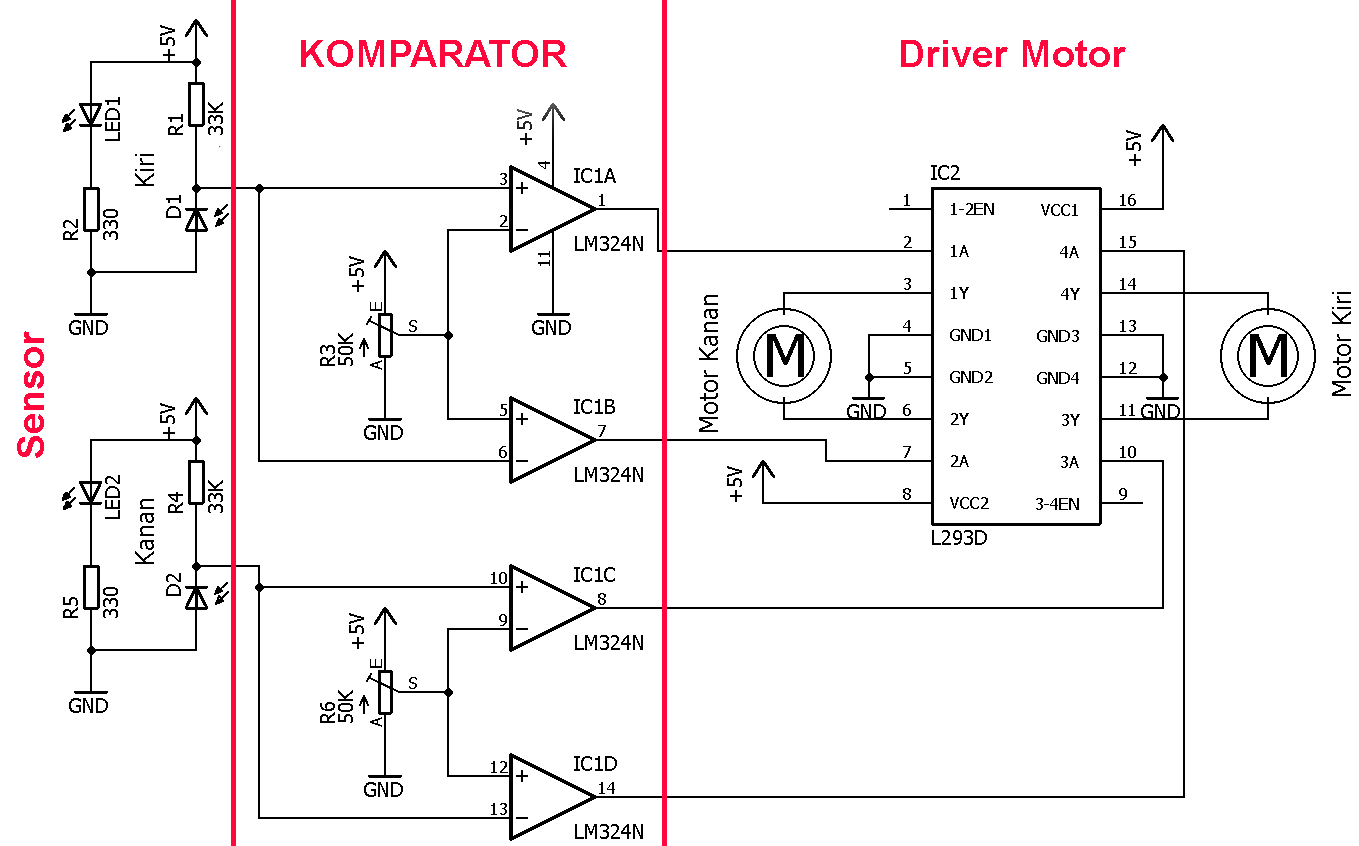
Skema ini terdiri dari 3 bagian yaitu Sensor, Komparator dan Driver Motor. Saya membuat skema rangkaian berdasar rangkaian yang saya dapat dari guru saya di SMK. Skematik rangkaian dibuat di software Eagle
Rangkaian ini untuk membaca garis Hitam
Prinsip Kerja Photodioda
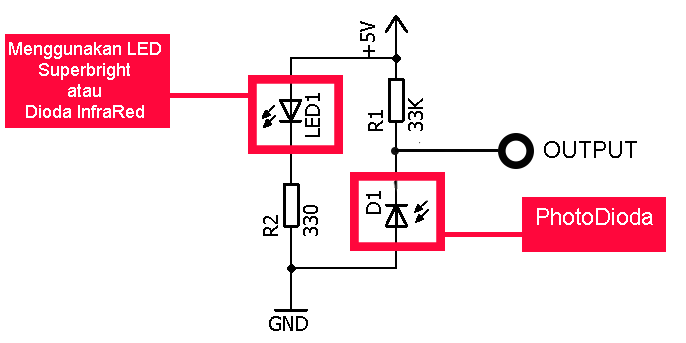
Jika kondisi gelap nilai tahanannya menjadi besar sehingga tidak ada arus yang lewat sedangkan ketika kondisi terang nilai tahanan menjadi kecil.
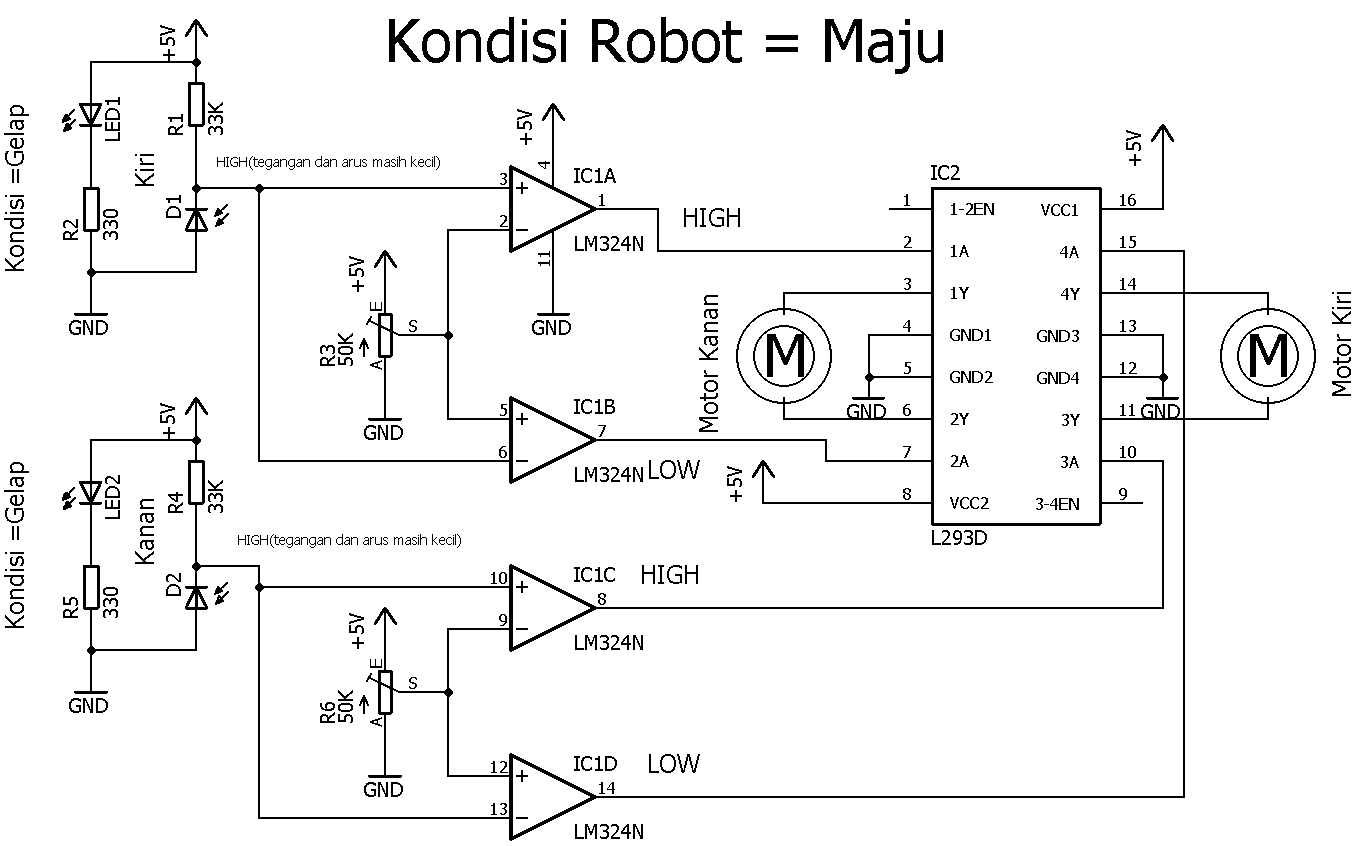
Untuk prinsip kerja dari rangkaian yang terpasang pada Robot Line Follower adalah sebagai berikut.
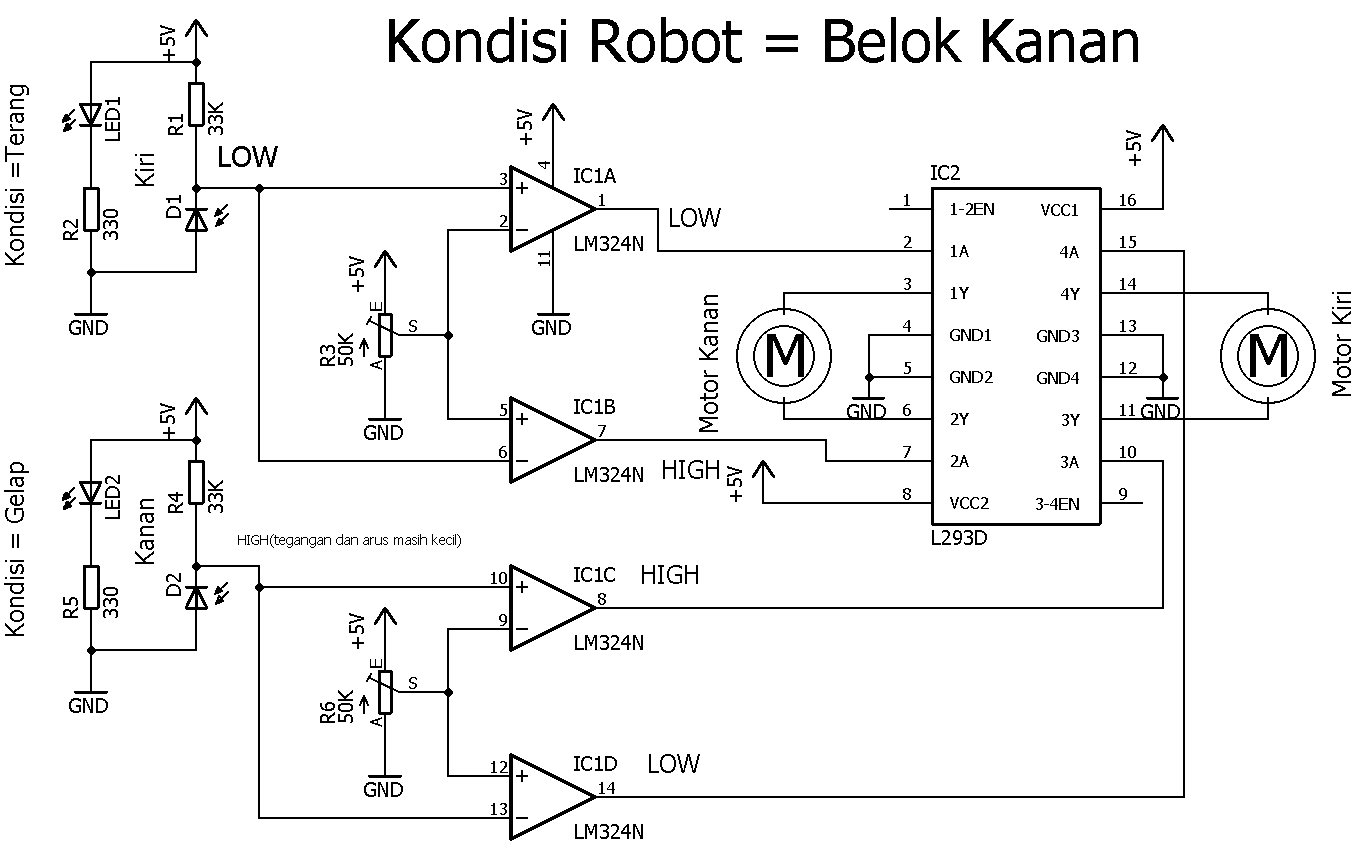
- Ketika Gelap maka nilai tahanan photodioda besar sehingga arus dari ground tidak dapat mengalir sedangkan arus dari VCC masih dapat mengalir dari resistor 33K ohm, sehingga OUTPUT = HIGH dengan tegangan dan arus yang kecil
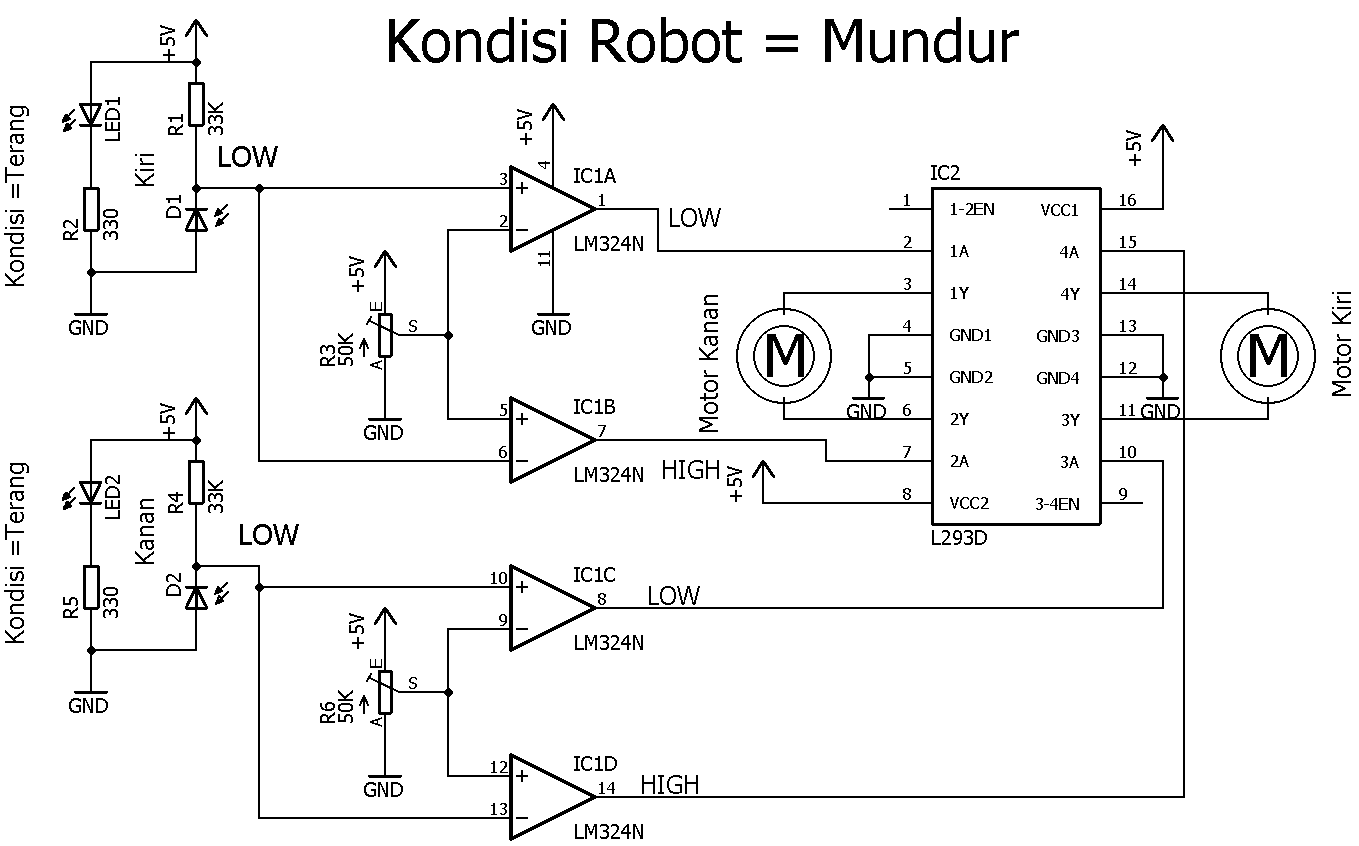
- Ketika Terang maka nilai tahanan photodioda mengecil sehingga arus dari ground dapat melewati photodioda, arus yang keluar dari photodioda lebih besar dibanding dengan arus VCC dari resistor 33K ohm maka OUTPUT = LOW.
Untuk jarak antar photodioda line follower berjarak -+28mm, jarak antar photodioda juga dapat diubah tergantung lebar jalur/garis. Saya menggunakan jarak kurang lebih 28mm, karena sesuai dengan lebar lakban yang saya gunakan sebagai jalur robot line follower.
Prinsip Kerja Komparator
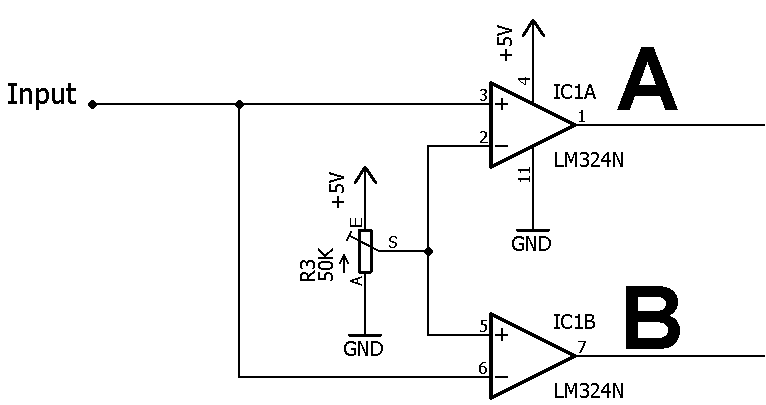
- Jika arus yang masuk ke Op-Amp A lebih besar dari Vref* maka output Op-Amp A = HIGH
- Jika arus yang masuk ke Op-Amp A lebih kecil dari Vref maka output Op-Amp A = LOW
- Jika arus yang masuk ke Op-Amp B lebih besar dari Vref maka output Op-Amp B = LOW
- Jika arus yang masuk ke Op-Amp B lebih kecil dari Vref maka output Op-Amp B = HIGH
Prinsip Kerja Robot
Untuk prinsip kerja bisa melihat gambar-gambar berikut
Jika ingin membuat Robot Line Follower untuk membaca garis putih, anda hanya perlu mengutak-atik sedikit dibagian Komparator.
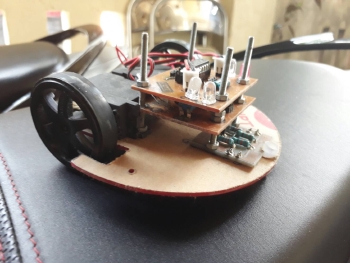
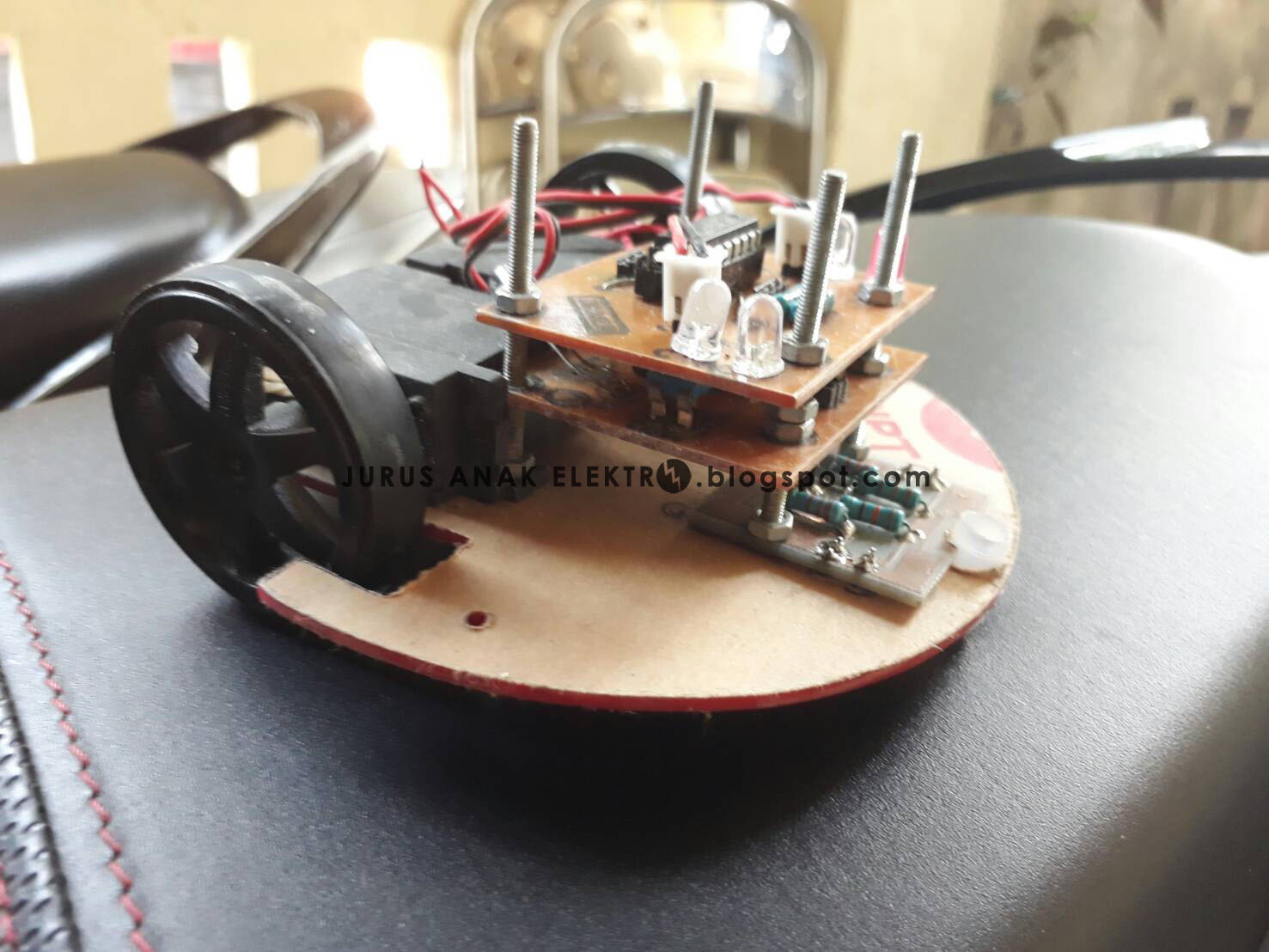
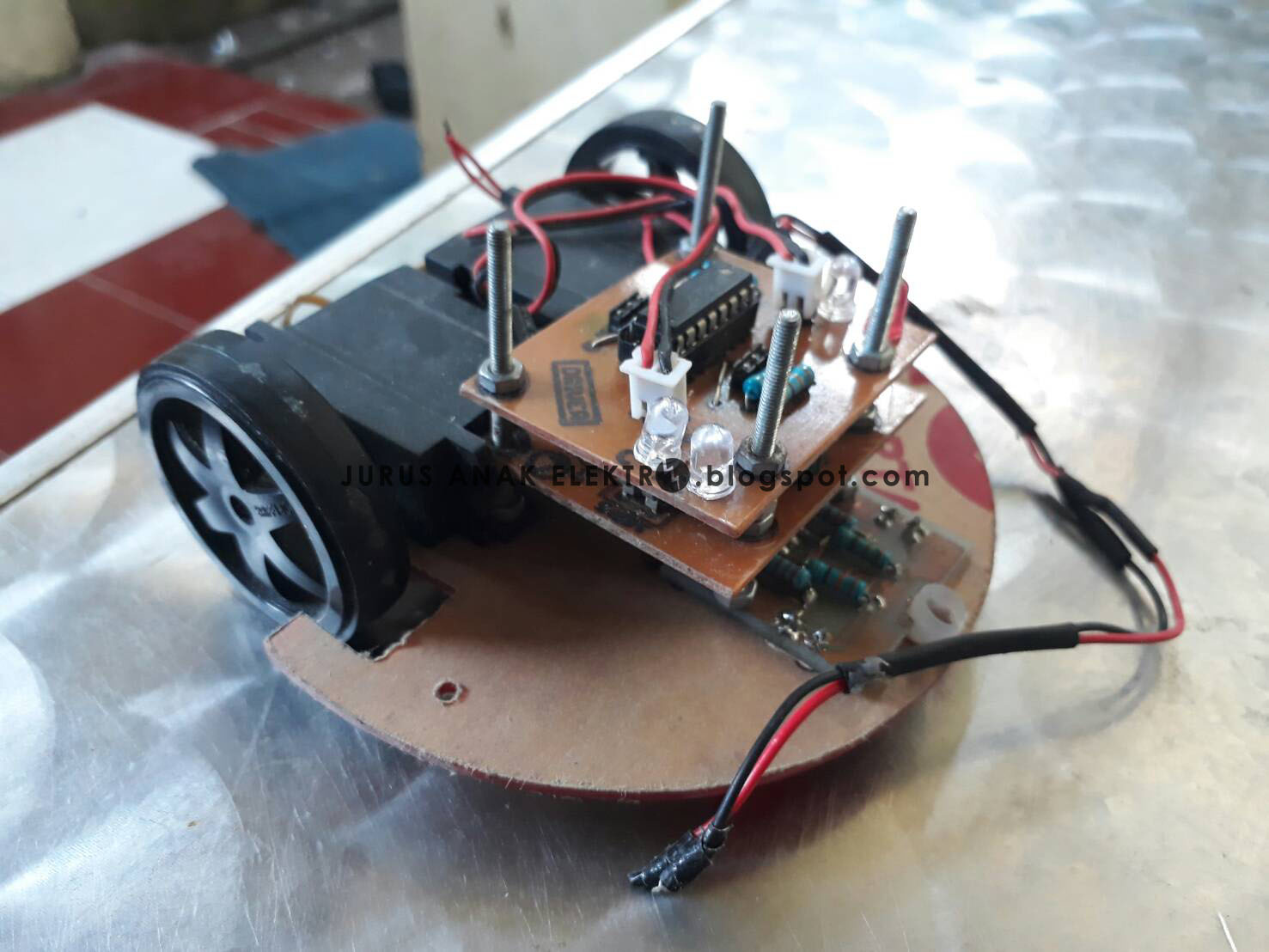
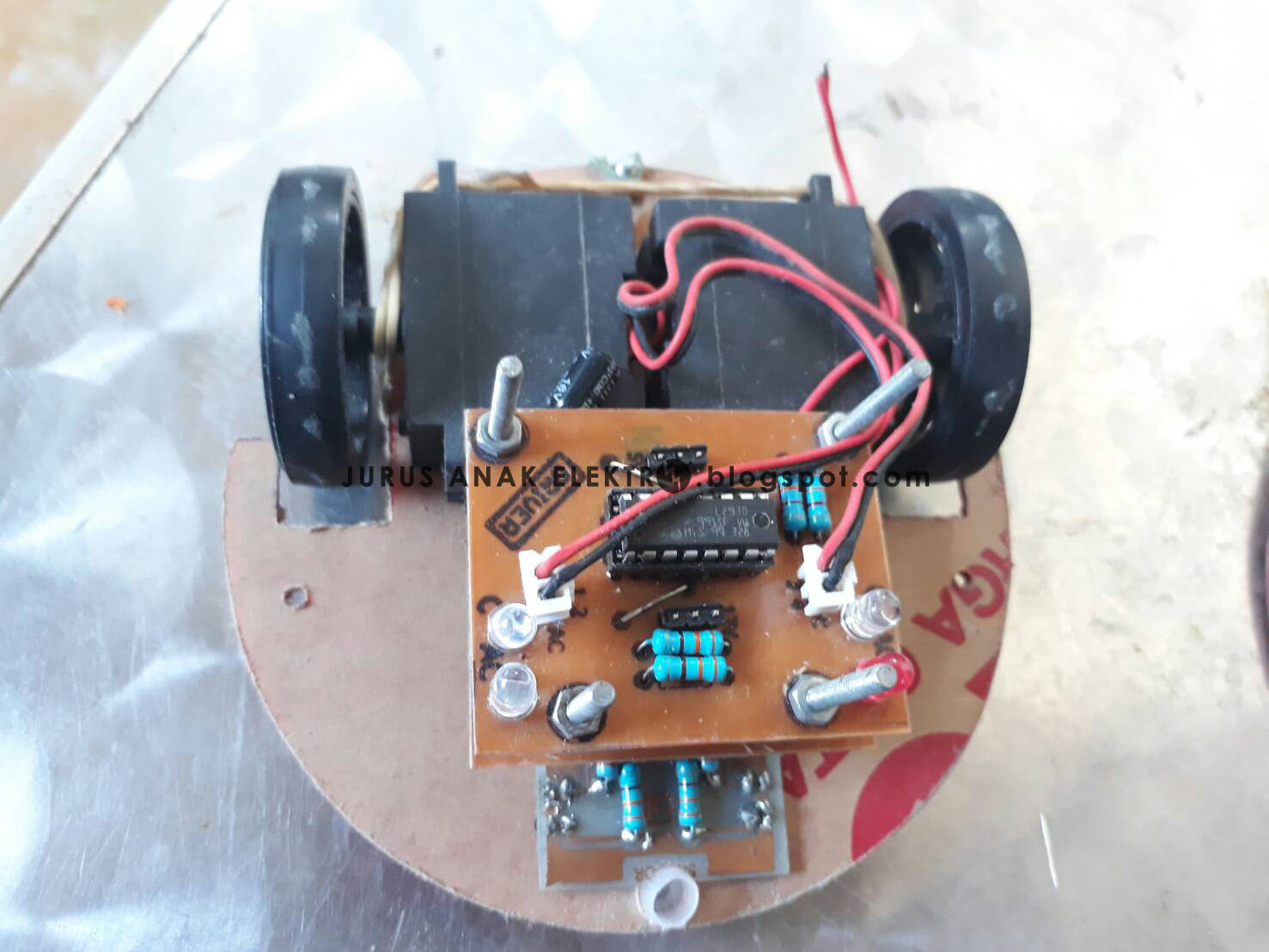
Berikut robot hasil kerja dari kelompok saya saat masih SMK. Disini kelompok kami menambahkan 4 LED pada tiap output IC Komparator sebagai indikator tiap output.
*Vref merupakan tegangan referensi untuk membandingkan tegangan input Op-Amp, pada rangkaian diatas Vref-nya adalah pin IC komparator yang tersambung dengan Potensio